Science: Physics:
The Structure of Chaos in a Stochastic Layer
By Dr. Sadrilla S. Abdullaev
Institute for Plasma Physics, Forschungszentrum, Jülich, Germany
I. Introduction
A phenomenon of dynamical chaos or
simply chaos became one of the intriguing and remarkable achievements
made in science of the 20-th century. It refers to the irregular,
unpredictable, and apparently random behavior of deterministic dynamical
systems. At the first glance a chaotic behavior in dynamical systems
contradicts the universal laws of motion. According to Newton's equations of
motion the position and velocity of a system at the certain moment of time is
uniquely determined by its position and velocity at the initial instant of
time. Its means the future state of the system is fully predictable if its
initial conditions are known.
At the end of the 19-th century a French
mathematician and physicist Henri Poincaré first noted that a motion of
planetary bodies may become unpredictable. In a modern terminology he predicted
a chaotic behavior of dynamical systems. He realized that the problem lay not
with the universal laws of motion, but with the specification of the initial
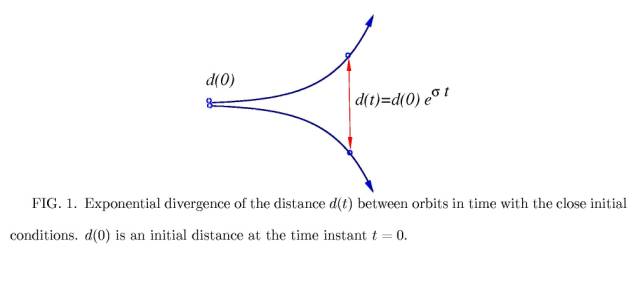
conditions, "… it may happen that small differences in the initial
conditions produce very great ones in the final phenomena. A small error
[change] in the former will produce an enormous error [change] in the latter.
Prediction becomes impossible …"
Later a number of distinguished
mathematicians, Emile Borel, Andrei N. Kolmogorov and followers proved that for
a vast majority of dynamical systems any small error in initial conditions will
be fast growing, and in general exponentially, that the prediction of results
will be practically impossible (see Figure 1). These dynamical systems called
as chaotic systems exhibit very sensitive dependence on initial conditions.
During the second half of the 20-th century many mathematicians and
physicists made enormous contributions for understanding and description of
this phenomenon in different areas of natural and engineering sciences, even
economical sciences [1,2]. A dynamical chaos occurs in wide-range problems of
physics, astronomy, chemistry, biology, and ecology. For instance, a particle
motion in accelerators, magnetic field lines in magnetically confinement fusion
devices, motion of planetary bodies in a Solar system, etc.
In
this short paper I would like to describe a simple example, which shows the
onset of chaotic motion in so-called Hamiltonian systems. This example also
demonstrates some new features of chaotic motion that has been recently found
(see Ref. [3] and references therein). For many fundamental models of physical
systems whenever dissipation is negligible Newton's equations of motion can be
formulated as a set of ordinary differential equations determined only by one
master function. This function and the corresponding equations of motion are
called Hamiltonian after 19-th century Scotish mathematician R. Hamilton
who first introduced them. Below I study the onset of chaotic motion and some
its properties in a simple model of Hamiltonian system.
II. Particle in a field of two waves
Consider a one-dimensional motion of a
charged particle in a field of two monochromatic electromagnetic waves
propagating along the axis x. The motion of particle is determined by the
Newton's equation
![]()
where m and e are a mass and an electric charge of a
particle, respectively, and E(x,t) is a strength of electromagnetic waves
![]()
The first wave with the amplitude E0 propagates with a velocity W0 along the axis x, while the second wave with the amplitude
E1 is running with the velocity W1. Suppose that the amplitude of the first wave, E0 is
much larger than the amplitude of the second wave, E1, i.e. E0
>> E1. The parameter c in the equation (2) is a phase difference
between waves.
To study the motion of particle it is
convenient to change a coordinate system x to the new
one q= x - W0 t which moves with the first wave with the velocity, W0. In the new coordinate system the equations of motion (1) can be
reduced to
![]()
where w0 = (eE0/m)1/2 is a frequency of oscillations a physical
meaning of which will be cleared below, the quantity W = W1 - W0 is
a relative velocity of the second wave with respect to the first wave. The
parameter e = E1 /E0 characterizes a relative
amplitude of the second wave.
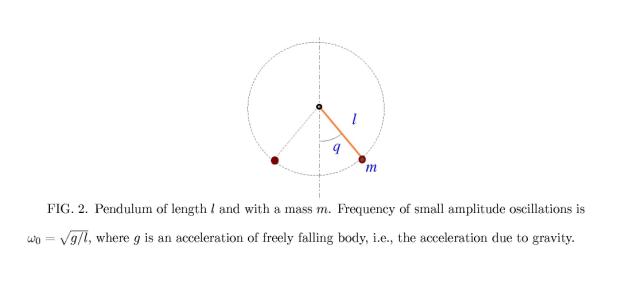
The equation (3) describes also the motion
of a pendulum whose a suspension point is oscillating with the frequency W and the amplitude e (see Fig. 2). Then the frequency w0 coincides with a frequency of small amplitude oscillations of the
pendulum.
Consider first the case of the fixed
suspension point when e = 0. The full energy of pendulum is then
conserved

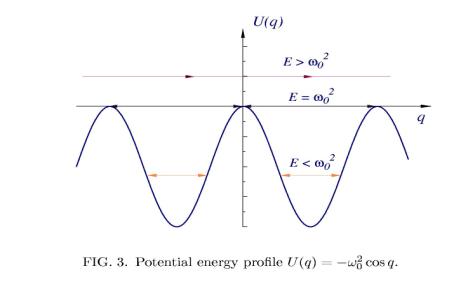
where U(q) is a potential energy shown in Figure 3.
There are two kind of motion of the pendulum. When the energy E is less than the maximum of the potential Umax = w02,
i.e., E < w02 the pendulum oscillates about the lowest point q=0. If E > w02 the pendulum rotates around the
suspension point. The first case corresponds to the motion of particle trapped
in a potential field of the first wave.
It is convenient to describe a motion on
the (q, p)- plane, where p= dq/dt is a momentum. The (q, p)-
plane is known as a phase space. An each point on this plane uniquely
determines a state of system. The variables (q, p)
satisfy to the following system of equations
![]()
For a given initial condition (q0, p0) at t = 0 the system of equations (1) has a unique
solution (q(t),
p(t)). The
latter can be displayed by a curve on the (q, p)- plane. The mentioned above two possible types of motion of the
pendulum are shown in Figure 4. Arrows indicate directions of motion. There are
also so called fixed points where the system is motionless, i.e., the
coordinate q and momentum p are fixed: ![]() . These points lie on the q- axis with the coordinates (qn = pn, p=0),
(n= 0, ±1, ±2,
. . .). There are
two kinds of the fixed points. The points with even numbers (n=2s, (s= 0, ±1, ±2, . . .) are so-called elliptic fixed points where the potential
function U(q) reaches its minimum value Umin(q2s) = -w02 .
These points are also called O- points
since trajectories around them form closed elliptic curves (see Figure 4).
. These points lie on the q- axis with the coordinates (qn = pn, p=0),
(n= 0, ±1, ±2,
. . .). There are
two kinds of the fixed points. The points with even numbers (n=2s, (s= 0, ±1, ±2, . . .) are so-called elliptic fixed points where the potential
function U(q) reaches its minimum value Umin(q2s) = -w02 .
These points are also called O- points
since trajectories around them form closed elliptic curves (see Figure 4).
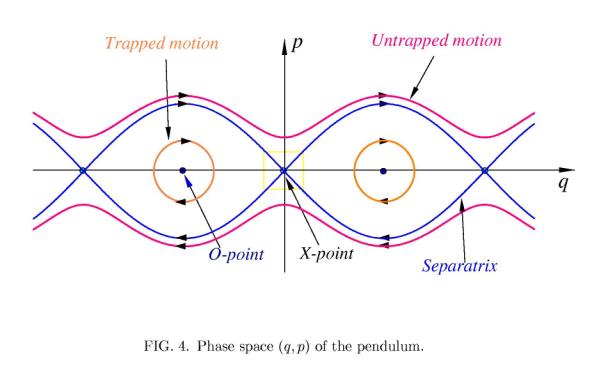
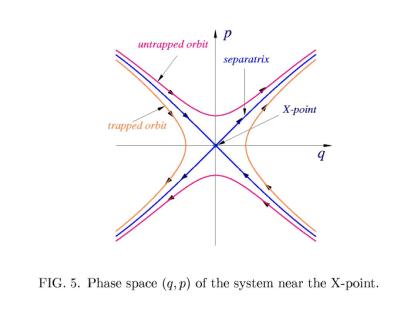
The second kind of the fixed points with
odd numbers (n=2s+1,
(s= 0, ±1, ±2,
. . .) are called hyperbolic
fixed points or X-points. At these points U(q)
reaches its maximum value Umin(q2s+1) = w02 , and two orbits cross each other
transversely. The orbits around the X-point are described by hyperbolic curves.
It is seen from the expanded view of the rectangular are of the phase-space
area near the X- point marked by the yellow in Figure 4 is shown in Figure 5.
As was mentioned above for E < w02 the pendulum oscillates about the lowest level q = 0, and this
regime describes the motion of the particle trapped by the main wave (the
orange curves in Figure 4). The pendulum is rotating if E > w02. It corresponds to particles, which are not trapped by the first
wave (magenta curves in Figure 4). The magenta curve above the q- axis (p
>0) describes
the motion of the un-trapped particle along the positive direction of q, i.e., (![]() ), and
below the q- axis (p <0) -
along the negative direction of q, i.e., (
), and
below the q- axis (p <0) -
along the negative direction of q, i.e., (![]() ). These two kinds of curves are separated by the phase space curves
(the blue curves in Figure 4) crossing each other at the X- points. These curves called as a separatrix correspond to
the motion of particle with the energy E equal to the maximum of a potential
energy, i.e., E = Umax = w02 .
). These two kinds of curves are separated by the phase space curves
(the blue curves in Figure 4) crossing each other at the X- points. These curves called as a separatrix correspond to
the motion of particle with the energy E equal to the maximum of a potential
energy, i.e., E = Umax = w02 .
Consider a motion of particle near the X- point more in a detail (see Figure 5). A particle slows down
along both; the trapped and non-trapped orbits when it approaches an area close
to the X-point and spend relatively long time in
this area. Moreover, if the particle moves along the separatrix it approach the
X- point asymptotically, i.e., it will
reach this point for infinite time. Let d(t) be a distance from the particle position
along the separatrix to the X- point. Then this distance changes with
time t as

where d(t0)
is a distance at the initial time instant t0.
Here a negative sign (-) corresponds to the case if a particle
approaches the X- point, and a positive sign (+) describes the case when a particle moves outward the X- point (d(t0)
¹
0). A parameter g is determined only system's behavior near
the X- point. For the pendulum it is equal to g = w0. A separatrix is very sensitive to any
small external time-dependent perturbations. The latter destroy the separatrix
leading to an irregular motion of particle. In the next Section we study this
phenomenon.
III. Chaotic motion
Consider the effect of the second wave
with the amplitude E1 on particle motion in the field of the first wave. As was
mentioned above the problem is equivalent to the pendulum whose suspension
point oscillates, and it is described by equations (3) with the non-zero perturbation
parameter e ¹
0. This problem is known
also a periodically--driven non-linear oscillator.
Suppose that the amplitude of perturbation
is small, i.e., e <<1. The
perturbation disturbs the orbits of the unperturbed pendulum. The disturbance
depends on how the orbits are close to the separatrix. The trapped and
non-trapped orbits located sufficiently far from the separatrix are only
slightly deformed. But orbits, which are close to the separatrix, are affected
drastically by the perturbation. A typical behavior of orbits located close to
and far from the separatrix is shown in Figure 6. Orbits close to the O-point
are only slightly deformed: the distance between the perturbed and the
unperturbed orbits with the same initial conditions does not grow (orange curve
in Figure 6).
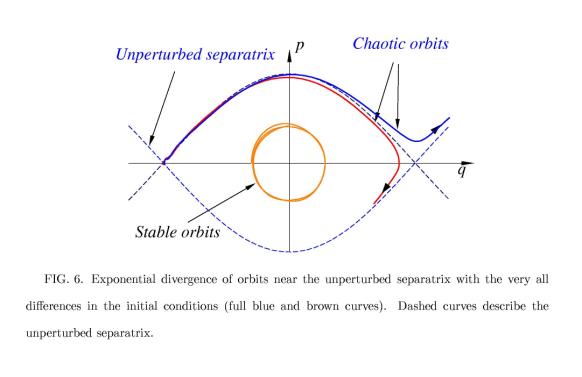
The orbits near the separatrix become very
sensitive to the slight change of initial conditions. The distance between two
orbits located near the unperturbed separatrix with very close initial
coordinates exponentially grows. A typical example of this is shown in Figure
6. Although, each orbit is uniquely determined by it's initial coordinates,
even very small difference in initial conditions leads to the dramatic change
in a final state of the orbit. Therefore, behavior of the systems near the separatrix
becomes unpredictable. Such a phenomenon in dynamical systems is called chaos
(or deterministic chaos).
A. Poincaré sections
Poincaré introduced a powerful tool to
study dynamical systems. This tool is based on displaying the coordinates of
the orbit (q(t),
p(t)) on
the phase plane (q, p) taken at periodic time instants tk = k
T , (k= 0, 1, 2, …) with a period T equal to the period of perturbation 2p/W. The set of points (qk, pk) = (q(tk),
p(tk)) is
known a Poincaré section. The relation between two consecutive points (qk, pk) and (qk+1, pk+1)
or the projection of (qk, pk) to
(qk+1,
pk+1):
![]()
is called a Poincaré map (more
precisely a stroboscopic map).
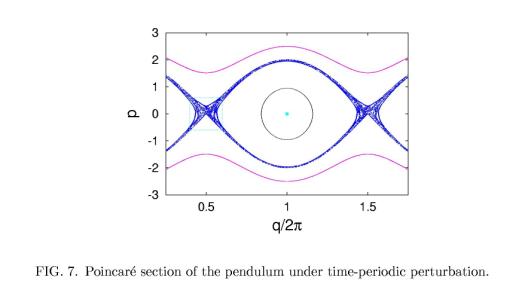
The Poincaré map is a convenient tool to visualize a behavior of
dynamical systems, especially, in a chaotic case. Poincaré section of the
periodically driven pendulum described by Eq. (3) is displayed in Figure 7.
B.
Stochastic Layer
If the orbit is a regular (non-chaotic)
the set of points (qk,
pk) form
a closed curve on the phase space (q, p). An
example of such orbits is plotted in Fig. 7 by pink and black curves. If the
orbit is chaotic the points are scattered on the (q, p) -
plane filling the certain region of the phase space. This region is called a stochastic
(or chaotic) layer. It is shown in Fig. 7 by blue dots formed near the
unperturbed separatrix. The width of the stochastic layer is maximal near the
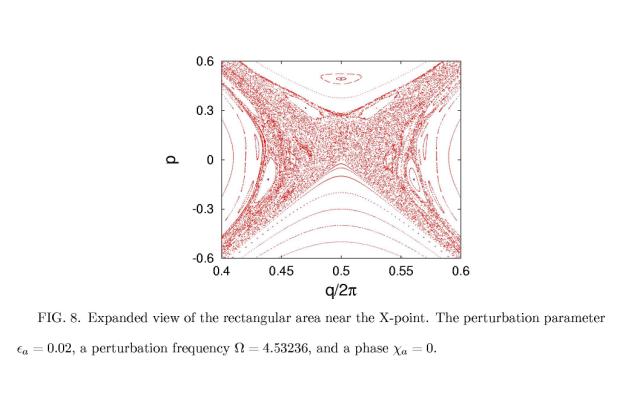
X-points. The stochastic layer is not uniformly filled with the scattered
points. There are small regions inside the stochastic layer and its boundary
region where orbits have regular (non-chaotic) behavior. These regions called Kolmogorov--Arnold-Moser
(or KAM) stability islands (after the mathematicians who proved a
theorem on existence such a stability of motion) are clearly seen in Fig. 8
where the expanded view of the rectangle region near the X-point plotted Fig. 7
is shown.
The motion in the stochastic layer is not
completely chaotic. There exist intervals of time during of which a motion can
be trapped at the border regions of KAM--stability islands. In such time
intervals a particle may move around islands almost regular. Duration of the
trapping time depends on the structure of each island. However, these trapping
events happen occasionally and randomly. One cannot exactly predict a trapping
time or its duration, but one can estimate a probability of trapping time
durations or in general, a statistical description of motion in the stochastic
layer is needed. At the beginning of chaos theory it is expected that a motion
in the stochastic layer can be described as a random walk process (similar to
Brownian motion) with the Gaussian statistics. Later when computational
capabilities were developed, it has been found that in typical chaotic
dynamical systems the Gaussian random process cannot always describe irregular
motion. It turns out that due to stickiness of motion to the KAM--stability
islands the statistics of chaotic motion deviates from the Gaussian one and
depends on the structure of the stochastic layer.
Below, we will show that the statistics of
chaotic motion in a stochastic layer significantly depends on the its topological
structure, and its mainly determined by the structure of the stochastic layer
near the X-points since particles spend relatively large intervals of time at
these areas of a phase space.
IV. Rescaling invariance of motion near
X-points
The width of the stochastic layer is
increased with the perturbation parameter e. The structure of the stochastic layer, i.e., the mutual
positions of the KAM stability islands, also changes with e. However, the change of the structure is
not arbitrary. It has been found that the topological structure of the
stochastic layer near the X-points is a periodical function of the logarithm of
the perturbation parameter e. In
this section we consider this non-trivial property of motion in a stochastic
layer, which has been recently established (see Ref. [3] and references
therein).
We will compare the structures of the
stochastic layer for the two sets of perturbation parameter e and its phase c. Let (ea, ca) be the first set and (eb, cb) be the
second set. For these parameters corresponding structures of the stochastic
layer are different. However, when these parameter are related according to the
following formula:
![]()
the phase--space topologies of the
stochastic layer near the X-point corresponding for these two sets of
parameters are conserved. The rescaling parameter l in (7) is determined only the parameter g describing the behavior of unperturbed
system near the X-point (see Section II) and the frequency
of perturbation, W: l= exp(2pg/W). Poincaré sections of the stochastic
layer near the X-points plotted Figs. 9 a and b for the perturbation parameters
(ea = 0.02, ca = 0) and for (eb = lea =
0.08, cb =ca +p), respectively, clearly show the similarity
of the structures. The rescaling parameter l is equal to 4.
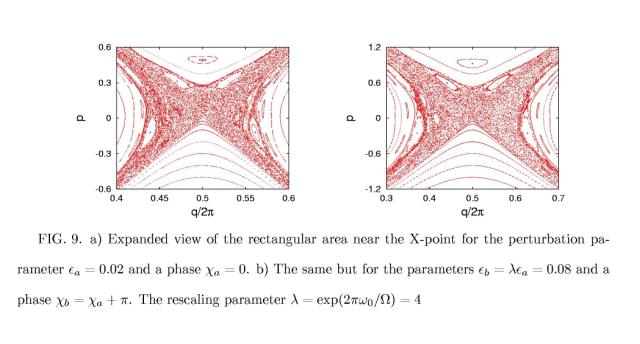
Moreover the phase--space coordinates (x,y) measured with respect to the X-point
coordinates, (qs,
ps), i.e., x= q - qs, y = p - ps, are rescaled according to relation:
![]()
In
Fig. 9 a, b the coordinates x, y are rescaled by factor l1/2=2.
Therefore the structure of the stochastic
layer near X-points is a periodic function of the
logarithm of the perturbation parameter, log e, and
with the period log l=
gT, where T is the
period time-periodic perturbation subjected to system.
V. Statistics of chaotic motion in a
stochastic layer
Since a particle motion in a stochastic
layer becomes unpredictable, it does not have a sense to follow each individual
orbit. A statistical description of particle motion in a stochastic layer
becomes more appropriate.
To be more specific we consider statistical
properties of chaotic particle motion along the q- axis. Suppose, that at the initial time instant t = 0 a large
number, N >> 1, of
particles are located in the stochastic layer near the X-point (q=
p, p=0). The initial coordinates of particles are
different but close to each other. Each particle will move along the q- axis randomly changing its direction during time evolution (t >0). One of the main statistical
characteristics of random motion is a mean square spatial displacement, defined
as

where the angular bracket <(…)> means a statistical averaging over all
particles:

The quantity s2(t)
grows with time t: s2(t)= 2D tg, where g and D are constants.
If the chaotic motion of particle in the
stochastic layer could be described as a random walk along the q- axis then the particle transport would be a normal diffusion
(Gaussian) process. For this process the exponent g = 1 and the constant D is called a
diffusion coefficient. For typical chaotic dynamical systems the exponent g no equal to unity, i.e., g ¹ 1. The case g >
1is called enhanced (or super-diffusive)
transport, while the case g <
1is known as a sub-diffusive
transport.
For our model of particle transport in a
stochastic layer the exponent g >
1. It is determined by
the structure of the stochastic layer, mainly near the X-points where a
particle slows down and spends relatively large time intervals. As was shown
above the structure of a stochastic layer near the X-points periodically changes with log e. If
the conjecture that similar structures of the stochastic layer give rise to
similar transport properties (for instance, the exponents g), then one can expect that the statistical characteristics of
transport are periodic (or quasi-periodic) functions of log e with
the period log l.
A numerical simulation really shows such a
log e - periodicity of transport
characteristics, which is shown in Fig. 10 for the dependence of the exponent g. 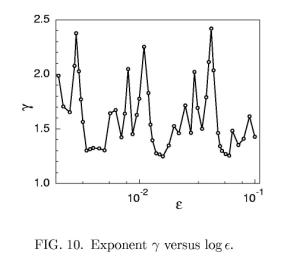 The period of oscillation of g is determined by the rescaling parameter l and equal to log l. It has been also found that the mean square displacement moment s2(t) is
also a quasi-periodic function of log e.
The period of oscillation of g is determined by the rescaling parameter l and equal to log l. It has been also found that the mean square displacement moment s2(t) is
also a quasi-periodic function of log e.
This property shows that the chaotic
transport rate along a stochastic layer is not a monotonically growing function
of the perturbation parameter e, as
it was originally believed. It demonstrates that the structure of a stochastic
layer near the X-point plays a crucial role in transport
processes.
Conclusions
In this paper I have presented the simple
example of a chaotic system and demonstrated the "non-chaotic"
property of its structure. This property shows that chaotic motion in dynamical
systems is not entirely irregular but it has a certain regular statistical
properties.
At the present time a chaotic behavior in
dynamical systems has been found in many branches of physical and engineering
sciences, as well as in socio -economical sciences. It plays an important role
in understanding of complex, irregular behavior of a wide variety of natural
and social phenomena. For readers interested more about a phenomenon of chaos
one can recommend a review article [1] and a book [2].
References:
1.
R.V. Jensen,
Chaos, in "Encyclopedia of Physical Sciences and Technology",
(Academic Press Inc., 1992) v. 3.
2. R.C. Hilborn, Chaos and Nonlinear
dynamics. An Introduction for Scientist and Engineers, 2-nd Edition (Oxford
University Press: New York, 2000).
3. S.S. Abdullaev (2000) "Structure of
motion near the saddle points and chaotic transport in Hamiltonian
systems", Physical Review E, 2000,
v. 62, pp. 3508-3528.
Dr. Sadrilla S.
Abdullaev was born on November 14, 1951, in the city of Tashkent, Uzbekistan,
in what was then the Soviet Union. The son of Sayfulla Abdullaev and Nuri
Adilova, he married Mavluda Ramizovna Nuriddinova in 1981, and the couple has
two children, Temura and 01iya. Dr. Abdullaev graduated from the Tashkent State
University in 1973 with a Master of Science degree in Physics. He received his
Ph.D. in 1981 from the Kirensky Institute of Physics of the Siberian Branch of
the USSR Academy of Sciences in Krasnoyarsk, and a Doctor of Sciences degree in
1992 from the Space Research Institute of the Russian Academy of Sciences in
Moscow.
Over the years, Dr.
Abdullaev has held various positions. From 1973 to 1977 he was a junior
scientific researcher at the Physics Department of Tashkent State University,
and held the same position in the Thermophysics Department of the UzbekAcademy
of Sciences from 1977 to 1981. Dr. Abdul1aev was a senior scientific researcher
at the Tashke University from 1982 to 1985, and at the Nuclear Physics
Institute of the Uzbekistan Academy of Sciences from 1985 until 1989. During
1985 and 1986 Dr. Abdullaev spent two years in Moscow at the Space Research
Institute as a visiting scientist. From 1989 to 1990, he was an Associate
Professor at the Tashkent University and head of the laboratory at the
Institute for Biocybernetics from 1990 to 1993. Since 1993 Dr. Abdullaev has been
holding the post of principal researcher at the Thermophysics Department of the
Uzbekistan Academy of Sciences. From 1994 to 1996, Dr. Abdullaev was a visiting
researcher at the Courant Institute of Mathematical Sciences at New York
University. Since 1997 he has been a guest scientist at the Institute of Plasma
Physics of the Research Center at Julich, Germany, where he presently serves as
a staff member.
Us
research interests focus on optics, acoustics, nonlinear dynamics and chaos.
Since 1994 his interests were extended to plasma physics and mathematical
physics. Among his main achievements were application of methods of nonlinear
dynamics and chaos to the wave propagation problems, development of new mapping
methods to study Hamiltonian systems, finding the periodicity of the
topological structure of motion in Hamiltonian systems during the onset of
dynamical chaos, Dr. Abdullaev is the author of the book Chaos and Dynamics of
Rays in Waveguide Media and has had more than seventy articles published in
professional journals. At the present time, Dr. Abdullaev is participating in
the fusion research project at the Research Center of Julich.